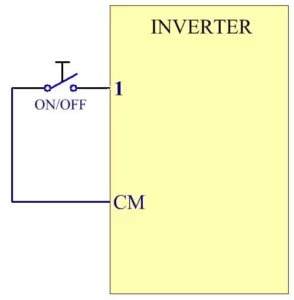
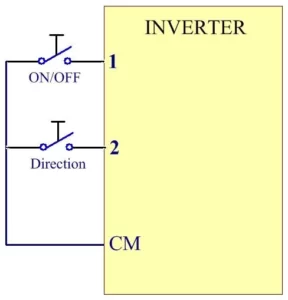
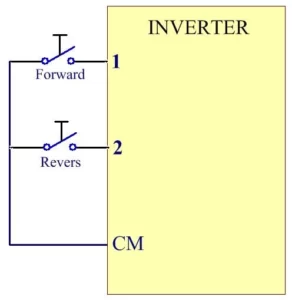
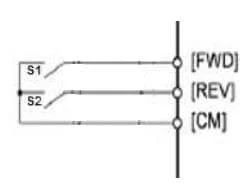
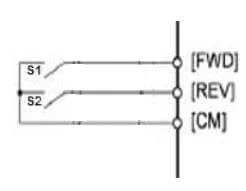
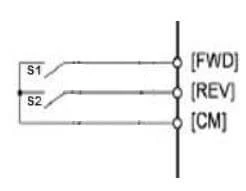
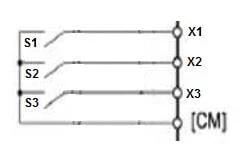
در مدار فوق با وصل کلید S1 موتور در جهت Forward شروع به کار خواهد کرد و با قطع کلید موتور خاموش خواهد شد .
در مدار فوق با وصل کلید S2 موتور در جهت Reverse شروع به کار خواهد کرد و با قطع کلید موتور خاموش خواهد شد .
توجه : در صورتی که هر دو کلید همزمان وصل باشند موتور اگر درحال کار باشد خاموش خواهد گردید .
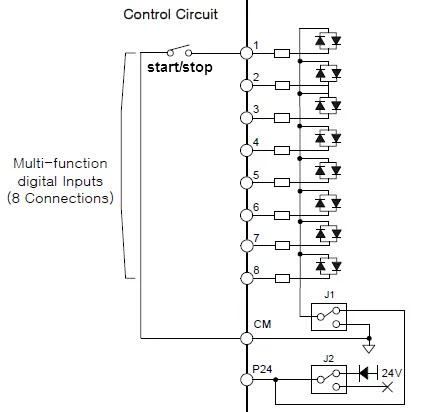
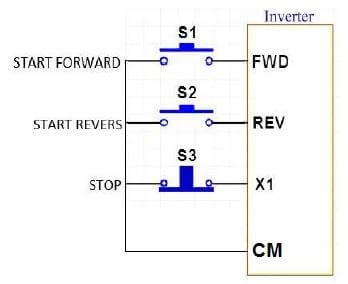
2 -2) راه اندازی اینورتر از روی ترمینالهای فرمان بصورت 3-wire
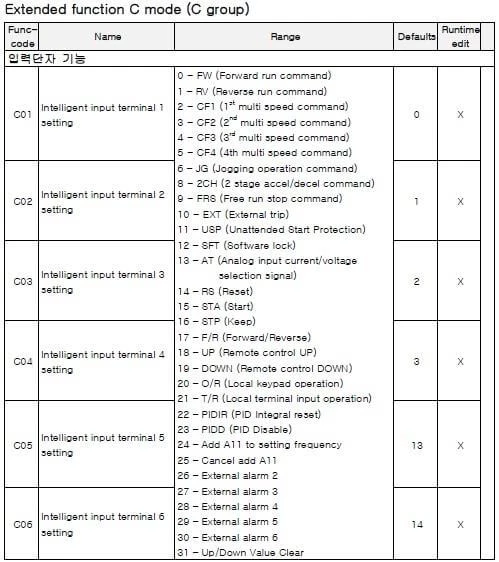
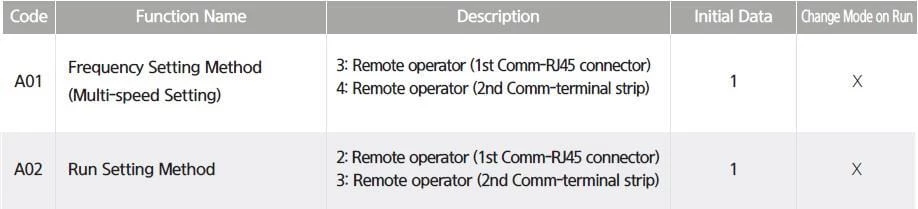
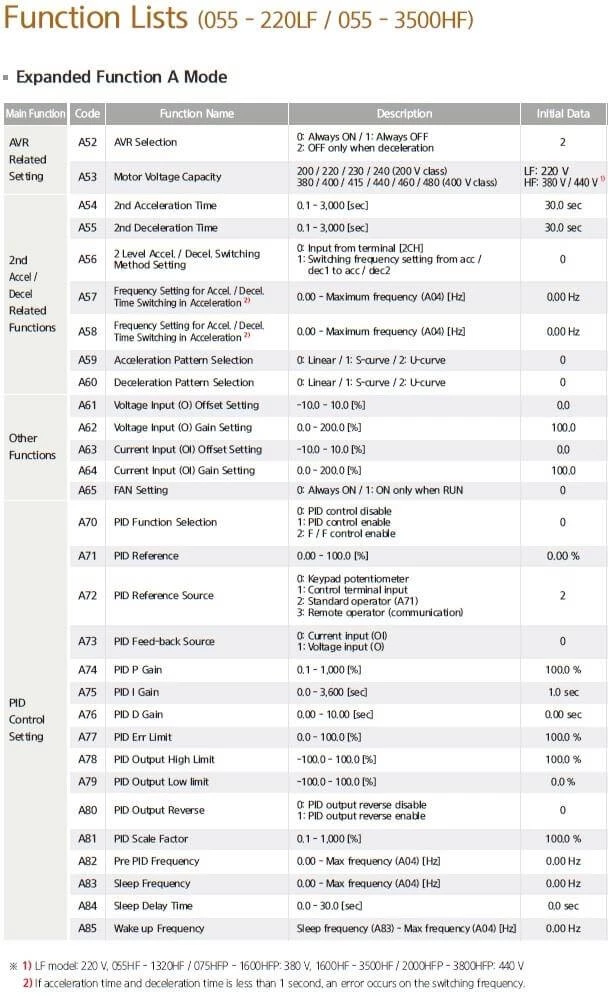
الف – پارامتر A02 = 1 قرار دهید . ( راه اندازی موتور از طریق ترمینالهای فرمان )
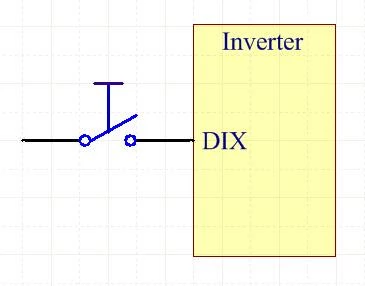
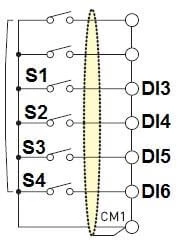
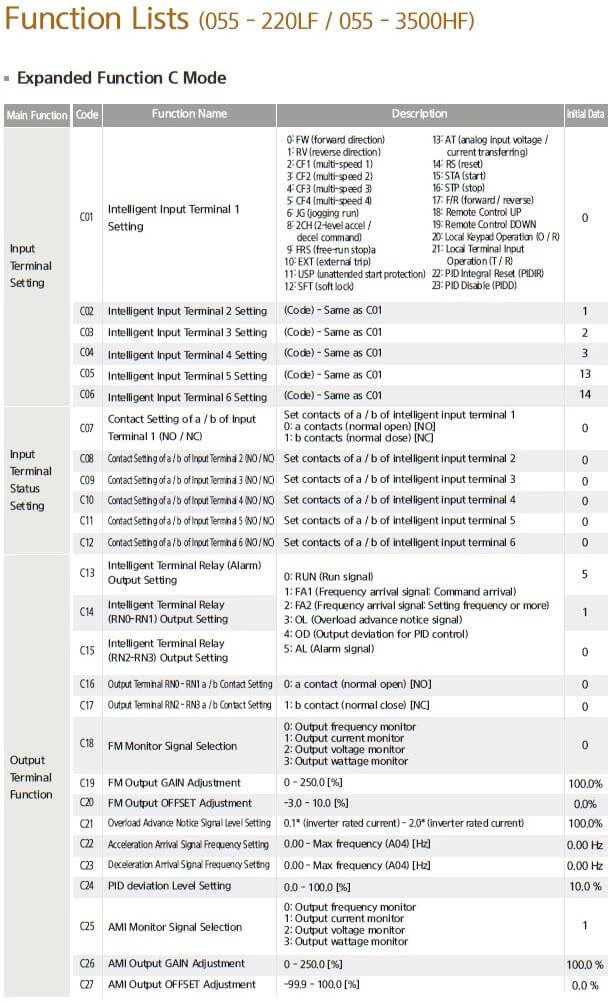
ب – پارامتر C03 = 15 قرار دهید . ( ترمینال 3 بعنوان شستی استارت )
ج – پارامتر C04 = 16 قرار دهید . ( ترمینال 4 بعنوان شستی استپ )
د – پارامتر C05 = 17 قرار دهید . ( ترمینال 5 بعنوان کلید انتخاب جهت چرخش موتور )
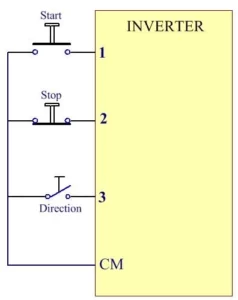
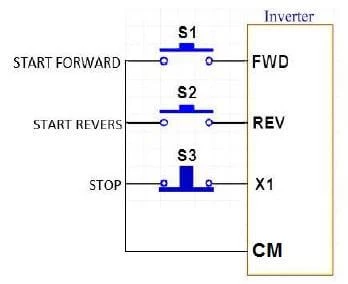
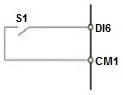
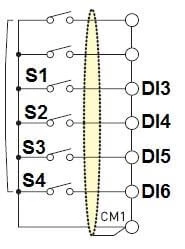
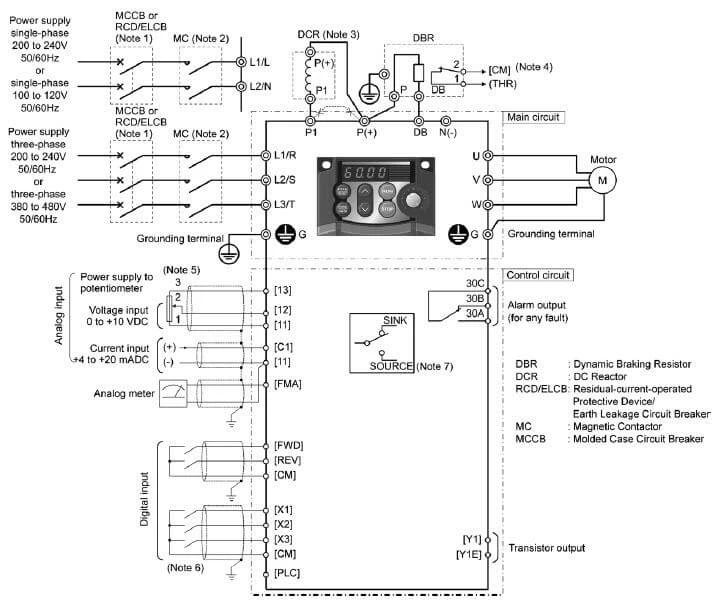
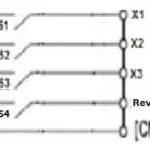
ج – مدار سیم کشی زیر را اجرا نمایید .
در مدار فوق اگر کلید S2 قطع باشد با فشار لحظه ای شستی استارت S1 موتور در جهت Forward شروع به کار خواهد کرد و با فشرده شدن لحظه ای شستی استپ S3 موتور خاموش خواهد شد .
در مدار فوق اگر کلید S2 وصل باشد با فشار لحظه ای شستی استارت S1 موتور در جهت Reverse شروع به کار خواهد کرد و با فشرده شدن لحظه ای شستی استپ S3 موتور خاموش خواهد شد .
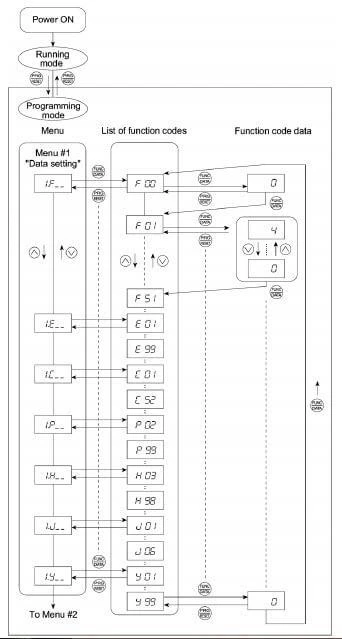
روشهای مختلف تغییر فرکانس خروجی اینورتر E1
(افزایش یا کاهش سرعت موتور)
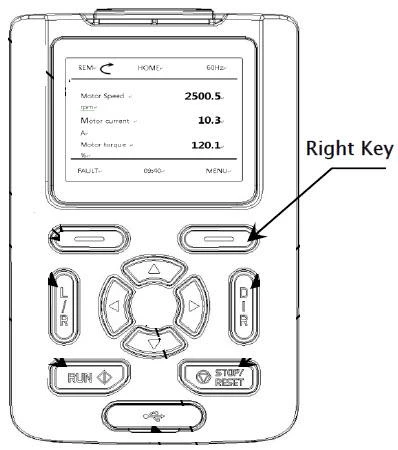
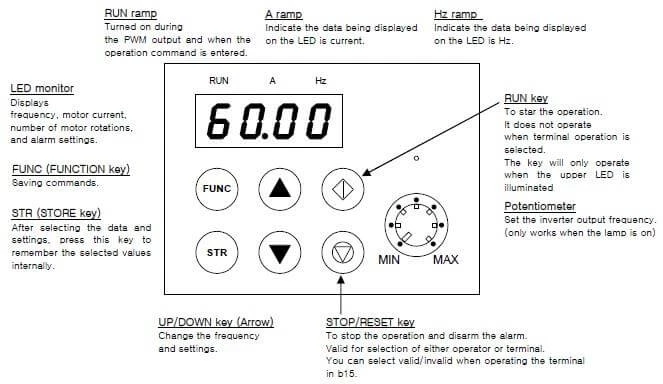
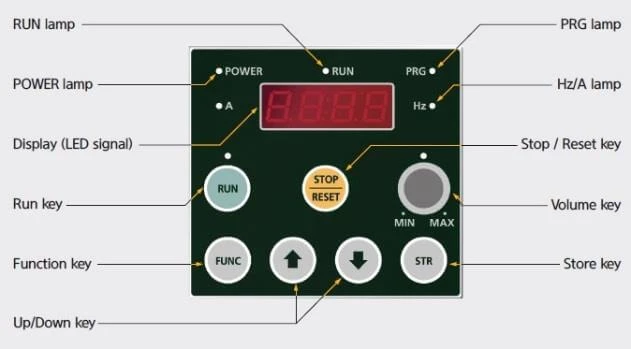
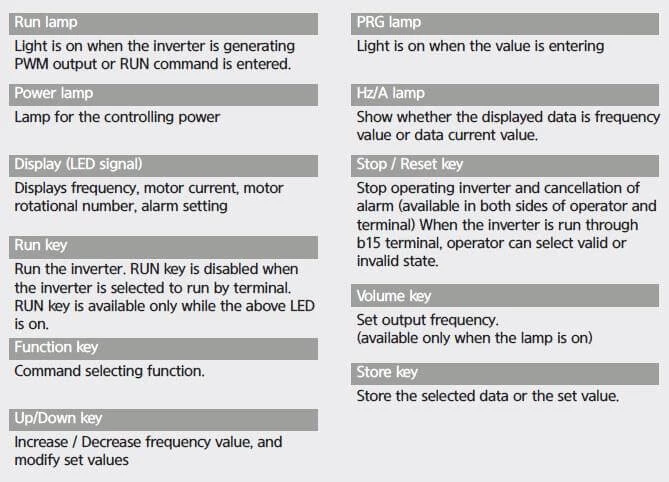
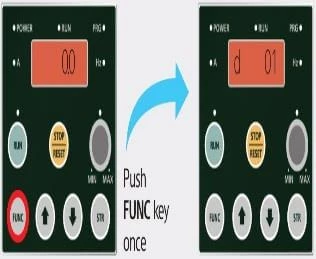
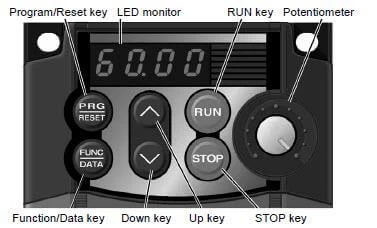
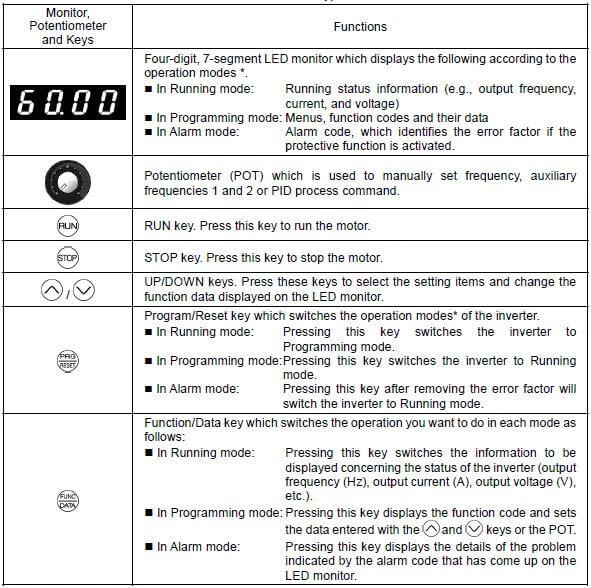
1– تغییر فرکانس خروجی اینورتر از روی شستی های کی پد
2 – تغییر فرکانس خروجی اینورتر از طریق ولوم روی کی پد
3 – تغییر فرکانس خروجی اینورتر از طریق ولوم خارج از اینورتر ( ورودی آنالوگ ولتاژی )
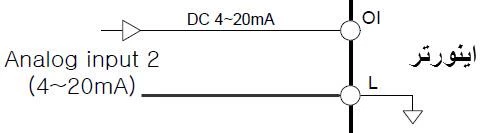
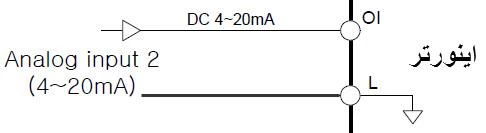
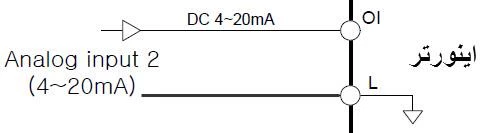
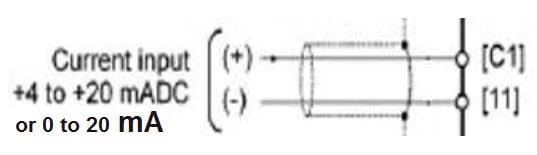
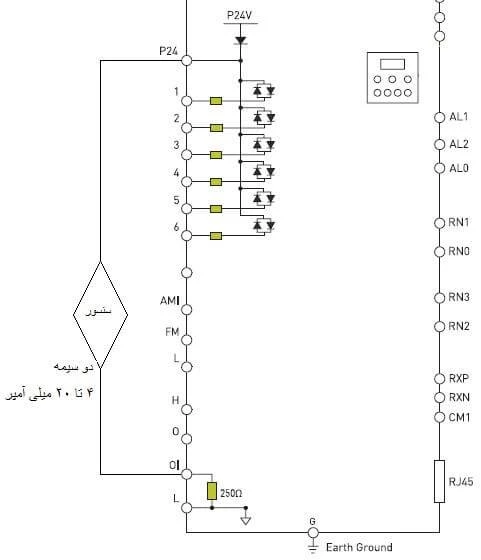
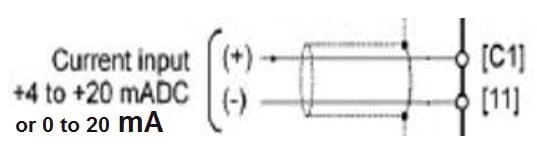
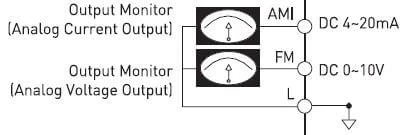
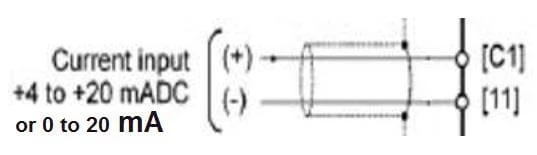
4 – تغییر فرکانس خروجی اینورتر از طریق ورودی آنالوگ جریانی
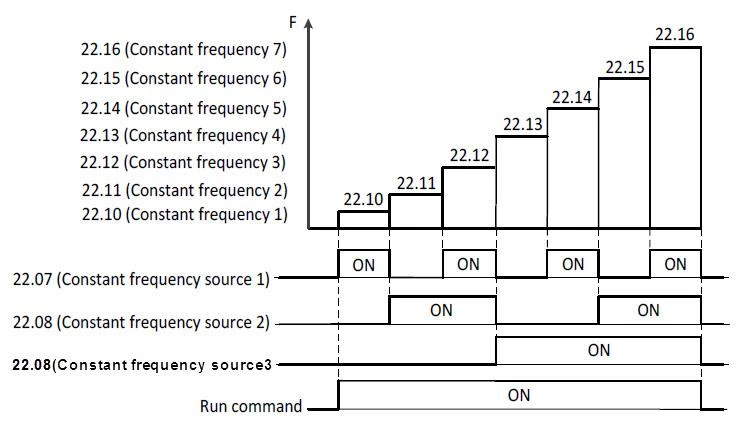
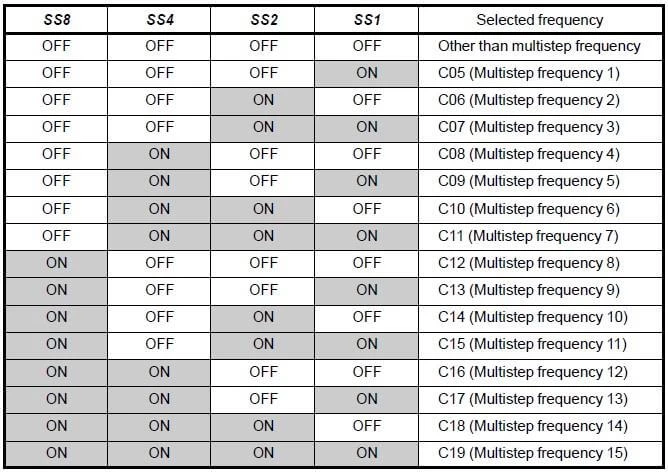
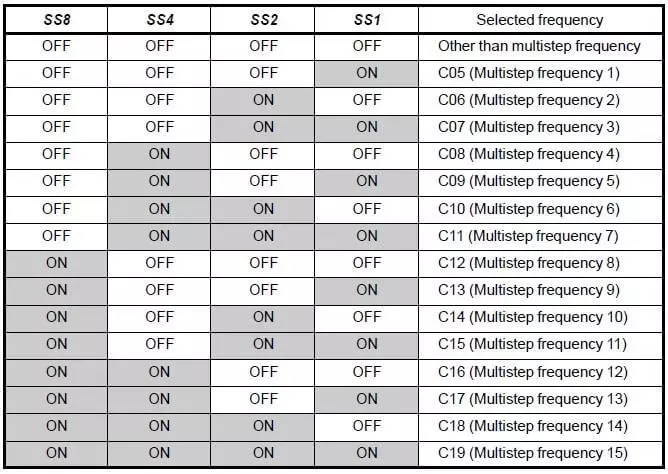
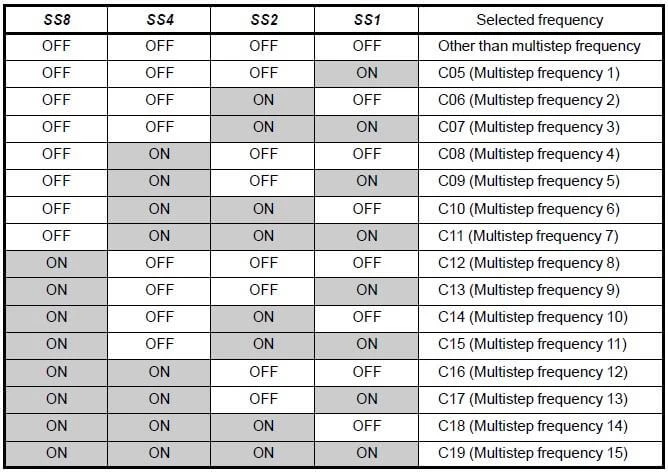
5 – تغییر فرکانس خروجی اینورتر بصورت پلکانی ( Multistep Frequency )
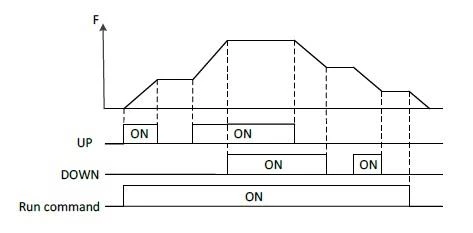
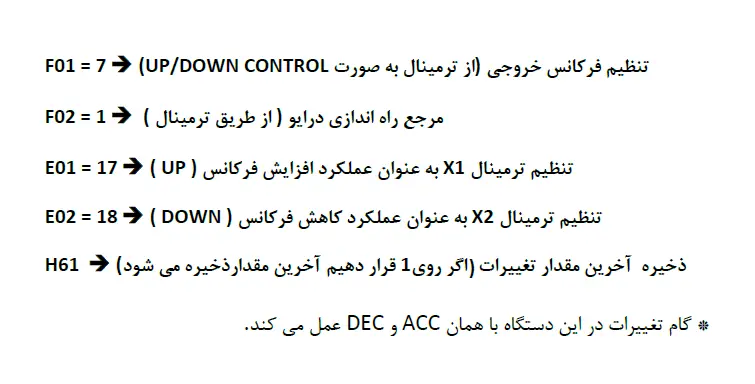
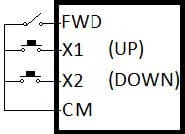
1 – تغییر فرکانس خروجی اینورتر از روی کی پد توسط شستی های رو به بالا و رو به پایین
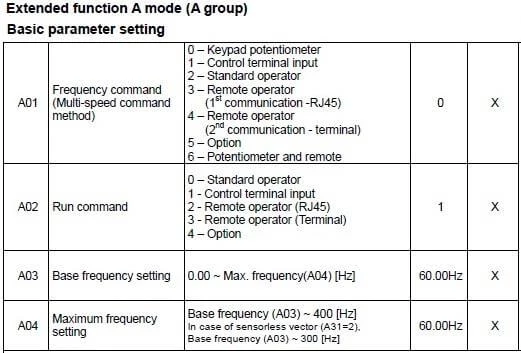
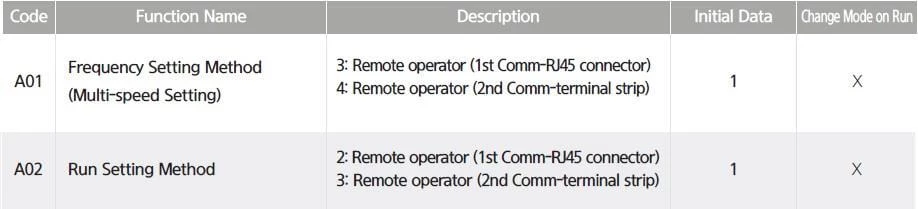
الف – پارامتر A01 = 2 قرار دهید . ( در این حالت میتوان فرکانس خروجی اینورتر را از روی کی پد و به روش بند (ب) تنظیم نمود)
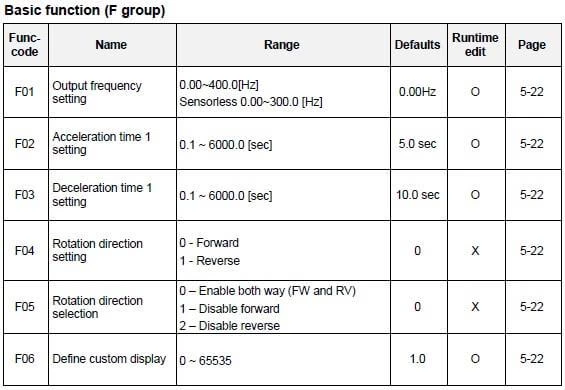
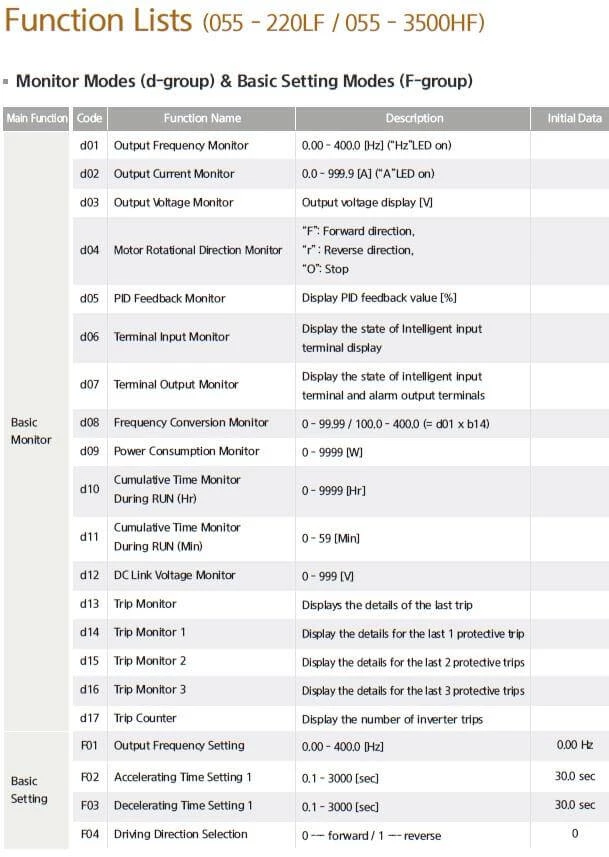
ب – در پارامتر ( مقدار فرکانس دلخواه F01 = ) فرکانس مدنظرتان را وارد کنید .
2 – تغییر فرکانس خروجی اینورتر از طریق ولوم روی کی پد
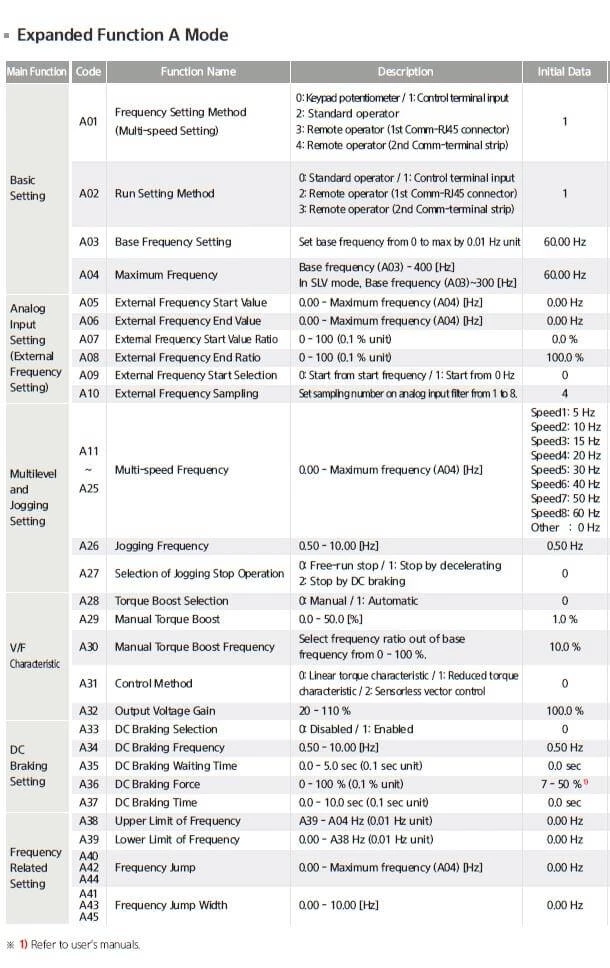
الف – پارامتر A01 = 0 قرار دهید .
ب – حال توسط ولوم روی کی پد میتوانید فرکانس خروجی( سرعت موتور ) را کم یا زیاد کنید.
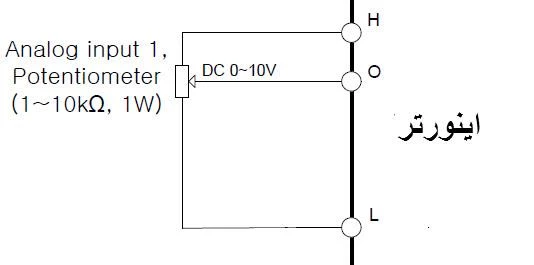
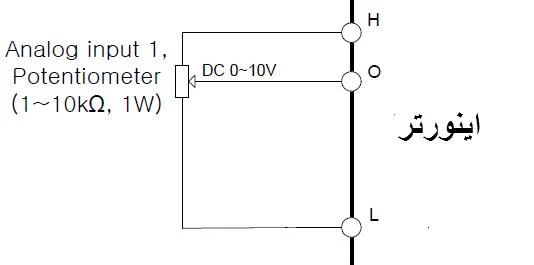
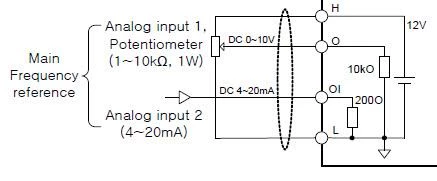
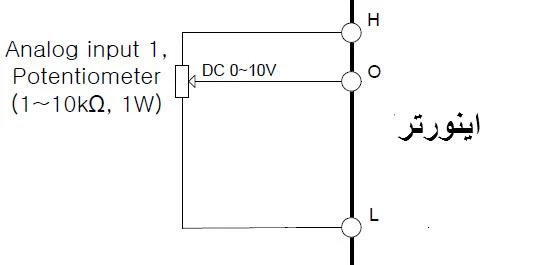
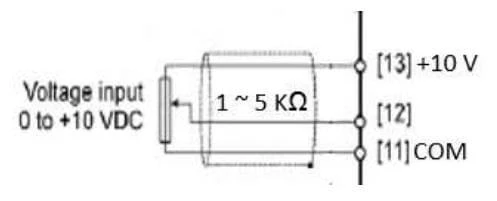
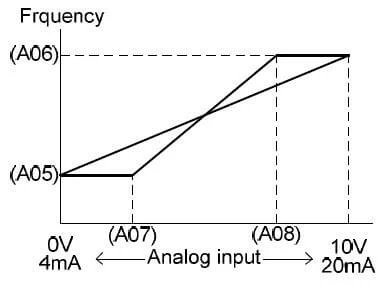
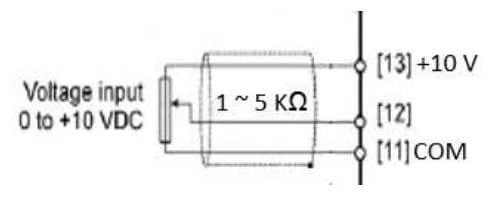
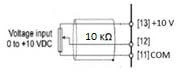
3 – تغییر فرکانس خروجی اینورتر از طریق ولوم خارج از اینورتر ( ورودی آنالوگ ولتاژی )
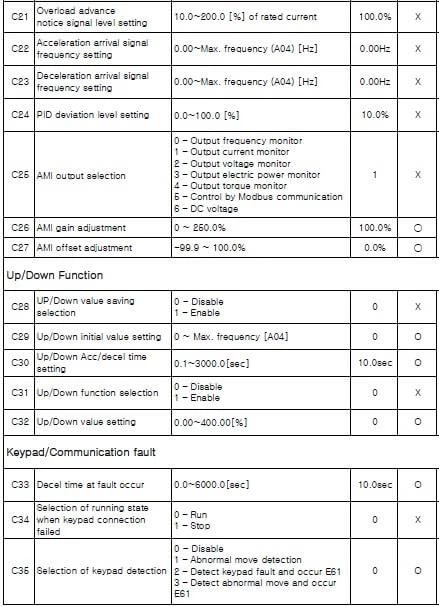
الف – پارامتر A01 = 1 قرار دهید. ( انتخاب ترمینال به عنوان کنترل فرکانس )
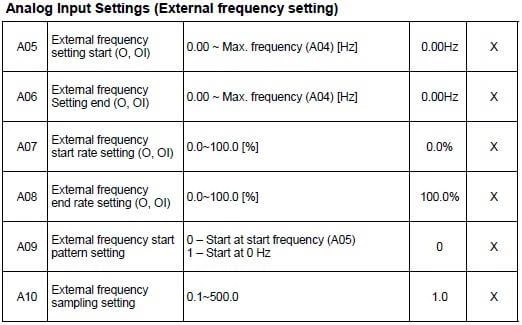
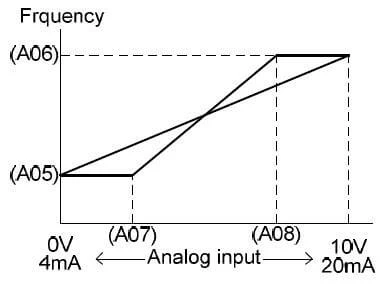
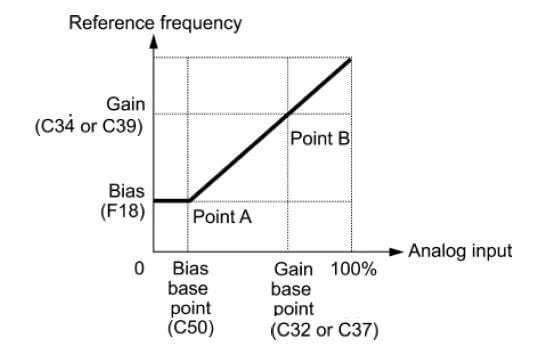
ب - پارامتر A05 =0HZ قرار دهید.
ج - پارامتر A06 = 50HZ قرار دهید.
د - پارامتر A07 =%0 قرار دهید.
ه - پارامتر A08 =%100 قرار دهید.
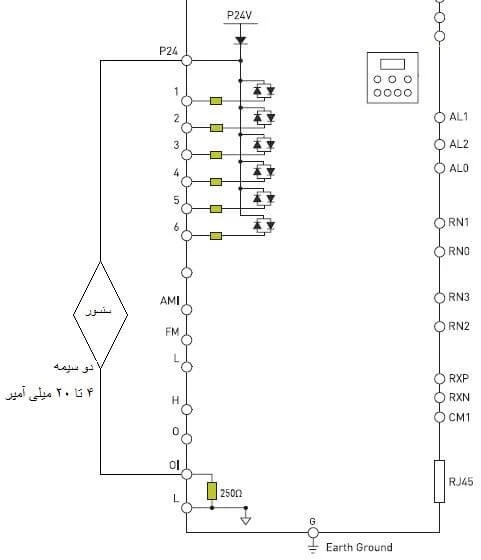
و – مدار سیم کشی مقابل را اجرا نمایید .